RXR-C360D-2 Robot Omnidirezionale 3.0



RXR-C360D-2Robot Omnidirezionale3.0
| Sfondate di u pruduttu: L'investigazioni in spazii periculosi, stretti è bassi sò sempre state estremamente impurtanti per l'investigazioni antiterroristiche è l'ispezioni di sicurezza. Attualmente, l'ispezioni di sicurezza antiterroristiche adottanu ancu ispezioni centralizate da parte di l'omu. Stu metudu d'ispezione richiede tempu è travagliu. I robot senza pilotu ponu cumpletà efficacemente a parte inferiore di u veiculu. U travagliu d'ispezione in zone cumplesse cum'è case è container riduce i costi di u travagliu è ottene efficacemente l'ispezione è l'eliminazione di l'indicatori di operazioni periculose. In a ricunniscenza di a casa, l'implementazione di l'ispezione di u chassis di u veiculu di salvataggio di ostaggi in zone strette è altre operazioni, u persunale d'implementazione ùn pò micca passà, risultendu in una acquisizione d'infurmazioni prematura è imprecisa, è hè faciule ritardà l'infurmazioni impurtanti. I robot senza pilotu ponu cuntrullà e pipeline, i spazii stretti è i veiculi secondu diversi ambienti. Riconoscenza è acquisizione d'infurmazioni impurtanti in lochi cum'è u chassis. A nostra sucietà hà sempre aderitu à a tecnulugia d'investigazione senza pilotu è hà introduttu continuamente novi prudutti d'investigazione senza pilotu. U robot omnidirezionale RXR-C360D-2 adotta a trazione à roti Mecanum, un funziunamentu flessibile, un muvimentu omnidirezionale, una velocità elevata è e dimensioni ridotte, chì ponu risponde à i requisiti di rilevazione per spazii stretti è bassi periculosi. |
| 1.Pdescrizzione di u pruduttu |
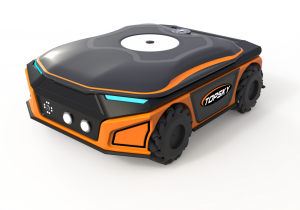
| U robot omnidirezionale RXR-C360D-2 hè un picculu robot d'ispezione cù un picculu vulume è un aspettu pianu. Hè principalmente utilizatu per ispezioni in spazii stretti è bassi. Pò ancu esse allargatu per caricà diversi moduli di sensori per rilevà l'area di destinazione. A rota motrice di u robot adotta u disignu di a struttura di a rota mecanum, chì hà a capacità di muvimentu di traslazione in ogni direzzione è angulu, muvimentu flessibile è funziunamentu convenientu. U robot hè caricatu cù un sistema video à dui canali per a guida è u cuntrollu, è hà una funzione di trasmissione d'imagine in tempu reale. À u listessu tempu, u radar per evità l'ostaculi in avanti pò impedisce à u robot di scontra ostaculi è migliurà a sicurezza d'usu; u controller hè chjucu è ligeru, cù alta integrazione, è hà e funzioni di cuntrollu di u robot è acquisizione d'imagine. Hè u raru robot d'ispezione prufessiunale cumpletamente funzionale per spazii stretti è bassi nantu à u mercatu. |
| 2.Campu d'applicazione |
| lIspezione di u chassis di u veiculu lIspezione di u fondu di grandi cuntenitori, scaffali è cuntenitori lIspezione di u fondu di i tavuli è di e sedie in i lochi di cunferenza lIspezione di diversi altri spazii stretti lIspezione di e zone periculose |
| 3.Funziunalità |
| 1. ★ Muvimentu omnidirezionale rapidu Stu pruduttu usa rote Mecanum, chì ponu spustassi in tutte e direzzione, sterzu flessibile, è faciule da aduprà. A velocità massima pò ghjunghje à 1,5 m/s, chì pò ghjunghje rapidamente à a zona di rilevazione è risparmià tempu. 2. ★Ricunniscenza spaziale chjuca Stu pruduttu hè di piccula taglia è pò rilevà zone chjuche è basse chì sò scomode per u persunale da osservà. A lente di vista superiore di a carrozzeria di a vittura pò ispezionà u chassis di a vittura. U radar per evità l'ostaculi nantu à a parte anteriore di a carrozzeria di a vittura pò evità l'ostaculi. 3.★Ricerca è Salvataggio Stu pruduttu pò ghjunghje è circà rapidamente zone periculose è zone chì sò scomode per e persone. E camere di visione notturna anteriori è posteriori di a carrozzeria ponu fà chì u pruduttu funziona di notte è migliurà l'efficienza di a ricerca è di u salvamentu. 4. ★ Anticollisione portatile U robot omnidirezionale hè dotatu di una camera è di un radar per evità ostaculi in avanti, è di una camera è di un dispositivu anticollisione in daretu, ciò chì porta una maggiore sicurezza à u pruduttu. |
| 4.Specifiche principali |
| 4.1 Parametri di u corpu di u robot: 1. Tensione di funziunamentu: 12V 2.★Velocità massima di muvimentu: ≥1.5m/s 3.★ Tempu di travagliu: ≥4 ore 4.★Distanza di cuntrollu: ≥60m 5. ★Pesu di carica: ≥3kg 6.★ Angulu massimu di scalata: ≥15° 7.★ Altezza massima di attraversamentu di l'ostaculu: ≥20 mm 8. A batteria pò esse rimpiazzata: sì 9. Sistema d'illuminazione: illuminazione LED × 8 d'alta luminosità 4.2 Parametri di u cuntrollu remotu: 1. Schermu: schermu di 7 pollici à alta luminosità 2. Maniglia di funziunamentu: funziunamentu di joystick duale 3. ★Durata di a batteria: ≥4 ore 4. ★Distanza di u telecomandu senza filu: ≥60m 4.3 Parametri di trasmissione di l'imagine: 1. ★Distanza di trasmissione di l'imagine: ≥60m 2.★Camera di guida: lente di visione notturna anteriore è posteriore + lente di vista superiore, u schermu pò esse cambiatu |