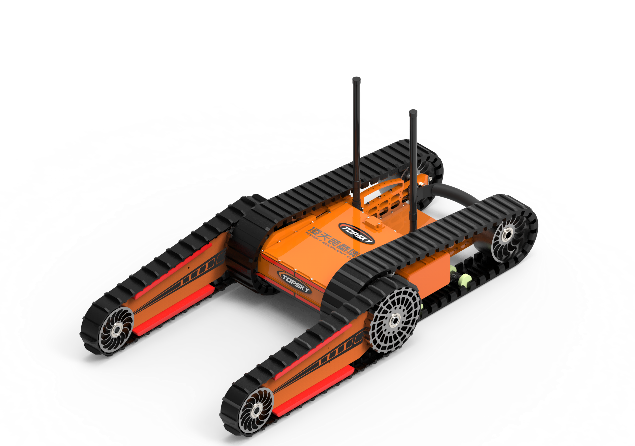
RXR-C10D Picculu robot di ricunniscenza di u focu


| I robot di ricunniscenza di u focu sò principalmente usati per rimpiazzà l'ambienti inflammabili, splusivi, cumplessi è altri duri chì si avvicinanu artificialmente per a ricunniscenza ambientale è a rilevazione di gas.Puderanu ancu esse usatu per ricunniscenza in spazii chjuchi è bassi, cum'è u fondu di u corpu di a vittura è u fondu di u scaffale.U chassis adopta una struttura di crawler + doppia oscillazione frontale, chì pò attraversà ostaculi verticali di 280 mm à u massimu, è pò cullà una piattaforma di 360 mm, chì pò adattà à diversi terreni per un rapidu implementazione di cummattimentu.L'interfaccia di espansione multifunzione pò esse dotata di diversi moduli di carrozzeria.À u listessu tempu, u robot hè dotatu di cuntrollu di filatu, chì pò operare remotamente à traversu filatu sottu a cundizione di interferenza di signale.I doppi bracci oscillanti di u robot ponu esse disassemblati liberamente, chì ponu esse aduprati in più scenarii. |
| 2.Features |
| 1. Smart remote controlMulti-funzione espansione buttone Funzionamentu visualizatu schermu grande 2. Modularization di tutta a macchina Modularizazione di u chassis, modularizazione di a bateria, modularizazione di sospensjoni 3. Eccellente prestazione in arrampicata, arrampicata scale, attraversà ostaculi è attraversà trincee Pò cullà pendii di 45 gradi Pudete cullà i scalini di 40 gradi Pò cullà ostaculi verticali di 28 cm Pò spannà 41 cm di larghezza di trinchera sistema 4.Video Modu di cumunicazione di 3 punti, per risolve l'operazione normale in un ambiente non visuale, distanza di cumunicazione 1km Camera HD à 2 canali Moduli di espansione 5.Multiple Modulu Lidar, modulu di rilevazione di gas, modulu di gimbal di ricunniscenza, modulu di bracciu roboticu
Quattru porti di plug aviation estesi, riservati RS232, RS485, CAN, portu di rete, 24V, 12V (normalmente chjusu)
|
| 3.Tparàmetri tecnichi3.1 U robot sanu: 1. Nome: RXR-C10D picculu robot di ricunniscenza di u focu (B) 2. Modellu: RXR-C10D 3. Funzione basica: funzione di ricunniscenza video 4. Livellu di prutezzione: u livellu di prutezzione di tuttu u robot hè IP67 5. Power: batterie elettrica, ternary lithium 6.Size: ≤lunghezza 610mm × larghezza 490mm × altezza 200mm (senza antenna) 7. Turning diameter: rotating in locu 8.Pesu: ≤25kg 9. Massima vitezza lineari: ≥2.7m/s, vitezza stepless di cuntrollu luntani 10. Quantità di deviazione dritta: ≤5% 11.Climbing capacità: ≥45 ° 12. Abilità di scalata: ≥40 ° 13. Altezza di traversu ostaculi: ≥280mm 14.Tempu di marchja cuntinuu: ≥2h 15. Distanza di cuntrollu remoto wireless: 500m (apertu) 16. Distanza di trasmissione video wireless: 500m (apertu) cumunicazione in dui punti;800m (apertu) cumunicazione in trè punti per scuntrà a scena di occlusione (opcional); 17.Wired distanza cuntrollu luntani: 100m 18.Distanza di trasmissione video Wired: 100m 19.Robot crawler: U robot crawler deve esse fattu di gomma ignifuga, antistatica è resistente à alta temperatura, cù Kevlar à l'internu, cù un disignu di prutezzione di derailment.
3.2 Percezione di u video robot: 1.Number è cunfigurazione di camere: I dui camere d'alta definizione nantu à u corpu ponu esse guardatu è cuntrullati à u stessu tempu, è l'ambienti intornu à a scena pò esse presentati stabilmente à u cuntrollu remoto, chì ponu suddisfà a guida wireless di u telefuninu. robot è migliurà assai l'efficienza di cummattimentu. 3.3 Paràmetri di cunfigurazione di u terminal di cuntrollu remoto 1. Dimensioni: 362 * 188 * 40 (Exclusing rocker height) 2. U pesu di a macchina sana: 2,5 kg 3. Display: micca menu di 10 inch schermu LCD d'alta luminosità, 4 canali di cambiamentu di signale video 4. Piattaforma sistema di cuntrollu: sistema upirativu window10 5. Tempu di travagliu: 2h (cuntinuu) 6. Funzioni basi: U cuntrollu remota è u monitoru sò integrati è portable, chì ponu esse guardatu è cuntrullati à u stessu tempu, è l'ambiente intornu à a scena pò esse presentatu stabile à l'operatore remota. (Funzione opzionale) Visualizzazione in tempu reale di u corpu di u veiculu è a putenza di a bateria di a scatula di cuntrollu remota, a distanza di caminata è altre informazioni, è pò cuntrullà i muvimenti di u robot in avanti, in daretu è di guida.U metudu di trasmissione di dati hè a trasmissione wireless cù u signale criptatu 7.Video arregistramentu è funzione di riproduzione: u video pò esse arregistratu in ogni mumentu, è u cuntenutu video arregistratu pò esse salvatu automaticamente, è u video pò esse ghjucatu direttamente nantu à u terminal di cuntrollu remoto, o u video pò esse copiatu à altri dispositi. 8. Funzione di cuntrollu di caminu: Iè, 1 joystick rende u funziunamentu flessibile di u robot in avanti, in daretu, turnà à manca è à diritta. 9. Video switch: Iè, self-reset jog switch 10. Funzione di cuntrollu di l'illuminazione: Iè, toggle switch
4.4 Altri: Bobina di cumunicazione cablata di 100 m Lunghezza: 100 mm |
| 4.Cunfigurazione di u produttu |
| 1. RXR-C10D robot di ricunniscenza di u focu chjucu (B) 1 set2.Scatola di cuntrollu remota (cumprese a batteria) 1 set 3. Charger di cuntrollu remoto (12.6V) 1 pcs 4. Charger di corpu di robot (25.2V) 1 1 pcs 5. Antenna di trasmissione di l'imaghjini 1.4GHZ 4 pcs 6. Comunicazione Wired 100 metri spool 1 pcs 7. Strumenti ausiliarii 1 set |